成果交流

Cell | 机器人育种家“吉儿”问世!中科院遗传发育所许操团队在智能育种和制种领域取得引领性突破
2025年8月11日,中国科学院遗传与发育生物学研究所许操研究员带领的智能育种攻关团队在Cell发表了题为Engineering crop flower morphology facilitates robotization of cross-pollination and speed breeding的研究论文。该研究将BT (生物技术) +AI (人工智能) 深度融合,首次提出作物-机器人协同设计 (Crop-robot co-design) 的“双向奔赴”理念,通过基因编辑重新设计作物花型,快速精准创制“机器人友好”的结构型雄性不育系,运用深度学习和人工智能成功研制世界首台可自动巡航杂交授粉的智能育种机器人“吉儿”GEAIR (Genome Editing with Artificial-Intelligence-based rRobots, GEAIR),打破杂交育种和制种瓶颈,大幅降低育种成本、缩短育种周期、提高育种效率。该研究开辟了“BT筑基+AI赋能+机器人(Robot)劳作”的智能育种(BAR)模式,标志着我国率先完成智能机器人育种闭环技术体系构建,在生物育种范式革新和催生新质生产力方面展现了“AI for Science”的重大应用前景。

杂种优势利用为提高作物单产保障粮食安全做出重大贡献。2024年全球杂交种子市场规模达3830亿元,预计到2029年将达到5904亿元;2024年全球番茄杂交种市值为85.4亿元,预计到2030年将达到150.5亿元【1】。但杂交育种和制种的高成本和低效率成为制约杂种优势利用的重要瓶颈。
杂交育种和制种通常需先对母本花朵去雄,再将父本花粉涂抹到母本花朵柱头上,整个过程依赖熟练工人在花朵绽放前的短暂窗口期操作。杂交育种需要使用不同亲本重复这项操作,而杂交制种则使用特定的亲本大批量重复这项操作,耗时耗力。以番茄为例,绝大部分商业种均为杂交种,但因柱头内缩的闭合花型,全球番茄杂交育种和制种至今仍完全依赖人工进行杂交授粉,这项工作的人力成本已占番茄总育种成本的25%以上,仅人工去雄一项就占番茄杂交授粉成本的40%【2-4】;随着人口老龄化,杂交制种的人工成本逐年升高。更为重要的是,一些花型闭合的作物因杂交制种成本过高,至今仍无法利用杂种优势。大豆杂交种有30%以上的增产潜力,但大豆花高度闭合,杂交授粉操作极其困难,无法进行杂交制种【5】。柱头外露的结构型雄性不育系可免除上述操作,一直是杂交育种和制种梦寐以求的性状。
结构型雄性不育系可从自然变异群体中偶然获得,也可对特定育种亲本进行大规模遗传诱变和筛选获得,但这些方法不仅难度大,周期长,往往可遇不可求,而且即使获得了不育系也只存在特定的遗传背景中,仍需通过经年累月的杂交导入才能在其他材料中应用。随着基因编辑技术的快速发展,人们开始尝试分别编辑调控花粉育性基因和花柱伸长相关的基因,试图聚合花粉败育性状和柱头伸长性状以产生柱头外露型雄性不育系,但至今难以成功。
许操研究员带领的智能育种攻关团队另辟蹊径,使用基因编辑靶向番茄花器官ABC模型基因中特异调控雄蕊发育的MADS-box基因GLO2,使原本闭合的雄蕊开裂而花粉败育,柱头无需伸长便可自然外露 (图1),成功创制结构型雄性不育系,且不影响杂交果实产量和种子质量,结束了番茄育种长期缺乏柱头外露型雄性不育系的历史,该技术摆脱了遗传背景限制,具有普遍适用性,为免除繁琐的人工杂交授粉操作,提高番茄杂交育种和制种效率、降低育种成本铺平道路。
工业革命通常与农业革命相伴相生,深刻影响性状选择偏好和农业生物育种路径。比如机械工业技术和化工技术促进了宜机收获宜施肥的半矮秆小麦育种和第一次绿色革命【6】。人工智能技术正在催生新一轮工业革命,并深刻影响农业生物育种的路径和走向,生物技术与人工智能的深度融合有望推动新一轮绿色革命。种子是农业革命的源头,育种技术革新和品种升级换代是绿色革命的内核驱动。柱头外露型雄性不育系的产生扫除了人工智能机器人进行杂交授粉操作的最大障碍,使得机器人代替人工进行智能自动化杂交育种和制种成为可能。
实现机器人杂交授粉并非易事,需攻克三重技术壁垒。首先是排除干扰:花朵与叶片、枝条等混在一起,且朝向多变,无规律可循,不仅需要识别花朵而且需要排除干扰,准确定位花朵方向。其次是识别精度:花朵和柱头等操作对象微小,识别困难。传统算法难以在复杂背景下实时定位微小的柱头,毫米级精度是成功授粉的前提。最后是操作力度:柱头仅能承受轻柔短暂的触碰,力度过大会导致柱头挫伤、折断无法坐果。
许操研究员与中国科学院自动化所的杨明浩副研究员带领的团队合作,用12,800张图像进行花朵定位、分割掩膜标记及柱头朝向检测的训练和测试,训练了YOLACT_Orient深度学习神经网络模型,花朵检测准确率达82.0%,单帧推理耗时仅0.06秒。运用伪双目测距策略,通过SURF特征匹配与RANSAC算法计算柱头3D坐标,使定位误差控制在7.67 mm内,计算耗时0.045秒。最后,螺旋伺服授粉策略结合轻量级神经网络确保花粉能够准确轻柔地递送至柱头表面,避免损伤柱头,保证授粉成功率。基于人工智能算法,团队研发了智能授粉机器人并在商业化生产温室稳定运行,柱头识别准确率可达85.1%,每授粉一个花朵仅耗时15秒,单次巡航授粉实现了77.6% ± 9.4%的成功率,且机器人可以全天候不间断进行反复巡航自动杂交授粉以确保每朵花成功授粉坐果(图1)。“吉儿”机器人的零部件国产化自主率已达95%以上,整机成本极具应用前景。
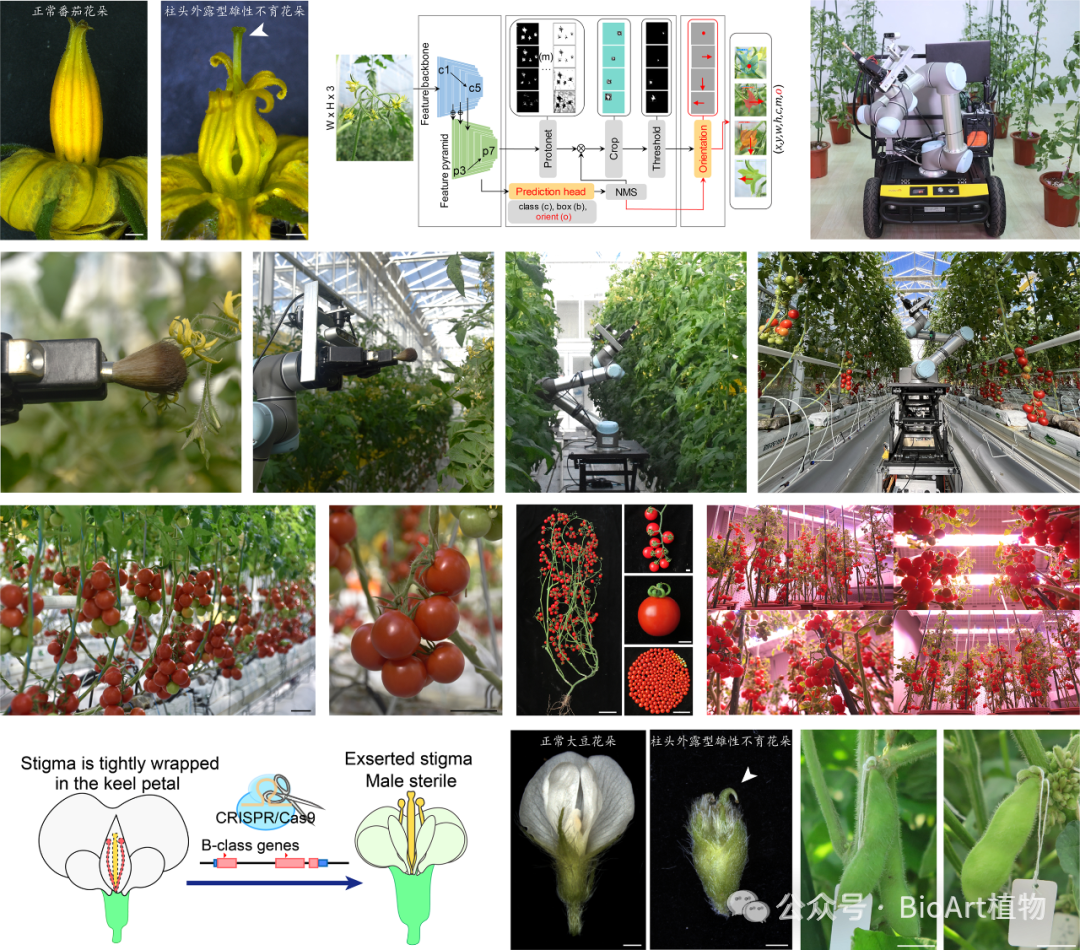
图1:番茄和大豆柱头外露型雄性不育系创制与智能机器人育种
研究人员进一步将“吉儿”机器人与许操研究员团队于2018年创建的“从头驯化(de novo domestication)”育种技术【7】以及“快速育种(Speed breeding)”技术【8】结合,建立了智能育种工厂(Breeding factory)(图2),使得近缘野生种的育种利用周期由原来的5年缩短为1年且节省人工,释放了作物野生近缘种在提升栽培种抗逆和口感特性的育种潜力,可批量快速培育风味浓郁的口感番茄和抗逆丰产的优质番茄新种质。为解决中国科协2025十大前沿科学问题“作物野生近缘种在提升栽培种抗逆特性的育种潜力”提供智能育种全新科技方案。
为突破杂交授粉成本过高导致大豆杂种优势无法应用的难题,研究人员将“吉儿”系统应用于大豆,首次实现结构型大豆雄性不育系快速创制,使用该不育系可节省76.2%人工授粉操作时间,有望为我国率先突破大豆杂交育种,大幅提高单产,提供具有非对称优势的新一代智能育种技术和智能装备(图2)。
针对人工智能时代的杂交育种,结合结构型雄性不育系的快速精准创制,许操研究员提出了杂交育种从“多系配套(两系/三系)”到“机器人配套”转变的理念。运用前沿生物技术重新设计作物花型,产生的柱头外露型雄性不育花型使得不育植物具备了区别于可育植株的“表型标记”,可以被机器人准确识别,无需经过耗时耗力的“分子标记”生物学实验鉴定不育系。同时,机器人可以自动完成“恢复系”和“保持系”对“不育系”的杂交授粉,可实现“机器人配套”的智能自动化杂交育种。
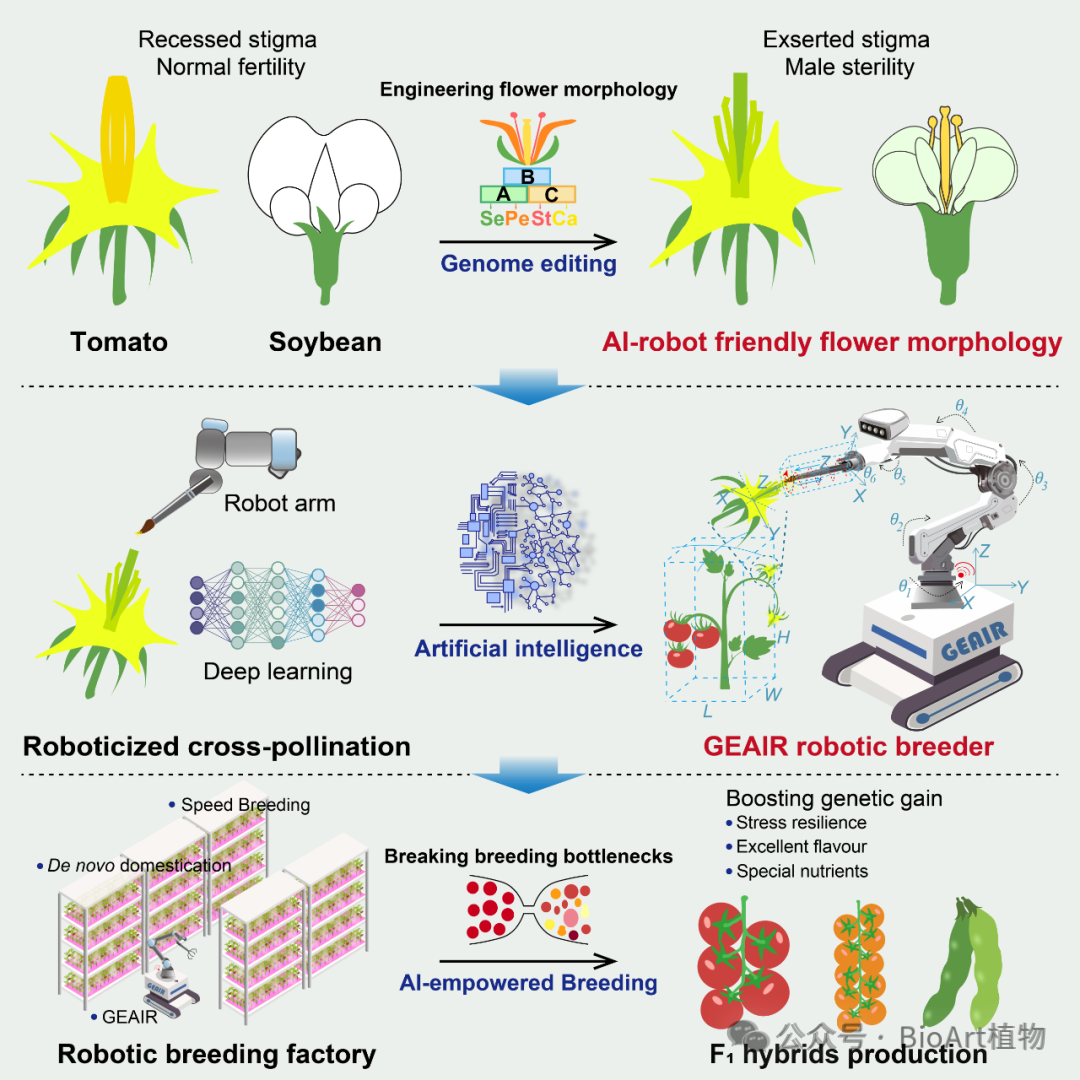
图2:作物花型重塑与AI机器人协同设计实现智能自动化杂交育种
Cell杂志审稿人对该研究给予高度评价,称赞其为一项令人振奋的创新性突破,是通过BT+AI交叉融合解决重大科技问题和产业难题的典范,具有广阔的应用前景。上述结构型雄性不育系创制技术和智能育种机器人相关技术已申请国家专利和PCT国际专利,许操研究员带领的智能育种攻关团队正在将“育种-生产-采收-追溯”全产业链进行BT+AI融合,研发机器人育种家“吉儿2.0版”,并将结构型雄性不育系拓展应用于不同作物。
中国科学院遗传发育所许操研究员为该论文的通讯作者,博士研究生谢跃、张廷浩和自动化研究所副研究员杨明浩为论文的共同第一作者。上海交通大学连文昭教授,清华大学陶建华教授,自动化所韩华研究员,遗传发育所邹玉盼博士,自动化所研究生吕鸿昌、孙杨昌、肖俊也参与了该研究。遗传发育所张凤霞博士和许操课题组陆叶子、张馨瑜、吕玉源等成员,以及自动化所齐靖达、王金阳、肖志纲、刘安琪,首农翠湖工厂李新旭、李树山、王利利等对该研究提供了重要支撑和帮助。该研究得到了农业农村部重大项目、中国科学院战略先导专项、国家自然科学基金、北京市智能温室蔬菜创新团队项目等项目的资助。
参考文献:
1.Hybrid Seeds Global Market Report 2025. https://www.thebusinessresearchcompany.com/report/hybrid-seeds-global-market-report.
2.Analysis report on the development opportunities and competitive risks in the tomato seed industry in 2024. https://www.globalmarketmonitor.com.cn/.
3.Kumar, S., and Singh, P. K. (2005). Mechanisms for hybrid development invegetables. J. New Seeds. 6, 381-407. https://doi.org/10.1300/J153v06n04_05.
4.Cheema, D.S., and Dhaliwal, M.S. (2005). Hybrid TomatoBreeding. J. New Seeds. 6, 1-14. https://doi.org/10.1300/J153v06n02_01.
5.Guard, A.T. (1931). Development of floral organs of the soybean. Bot. Gaz.91, 0097-0102. https://doi.org/10.1086/334129.
6.Shah, L., Yahya, M., Shah, S.M.A., Nadeem, M., Ali, A., Ali, A., Wang, J., Riaz, M.W., Rehman, S., Wu, W.X., et al. (2019).Improving lodging re-sistance: Using wheat and rice as classical examples. Int. J. Mol. Sci. 20, 4211. https://doi.org/10.3390/ijms20174211.
7.Li, T.D., Yang, X.P., Yu, Y., Si, X.M., Zhai, X.W., Zhang, H.W., Dong, W.X.,Gao,C.X., andXu,C.(2018).Domestication of wild tomato is accelerated by genome editing. Nat. Biotechnol. 36, 1160-1163. https://doi.org/10.1038/nbt.4273.
8.Watson, A., Ghosh, S., Williams, M.J., Cuddy, W.S., Simmonds, J., Rey, M.D., Hatta, M.A.M., Hinchliffe, A., Steed, A., Reynolds, D., et al. (2018).Speed breeding is a powerful tool to accelerate crop research and breeding. Nat. Plants 4, 23-29. https://doi.org/10.1038/s41477-017-0083-8.
论文链接:https://doi.org/10.1016/j.cell.2025.07.028
